Plate Robot Full Chassis
Solutions for Med tech, Life Science Instrumentation, Semiconductor and Advanced Industrial applications.
After developing this XYZ motion system, we worked closely with this customer through several generations of the machine resulting in a very compact stable chassis upon which their enclosure (i.e., housing shell with name and logo) was attached.

Fully Involved Plate Handling System
Project started with a discussion about providing a means to move a 96 well microplate in an x-y plane to a precise location within the center of each well. Then move an objective (i.e., optical element) along the z-axis over the well center for focusing. Dwell, capture image, and repeat sequence until all wells are imaged.
Perfect application for an XYZ motion platform. Within a week our 3D concept model was being reviewed and discussed with the customer. From that point it was realized that the structure of the XYZ motion platform would be well suited for attaching the housing with branding and company logo.
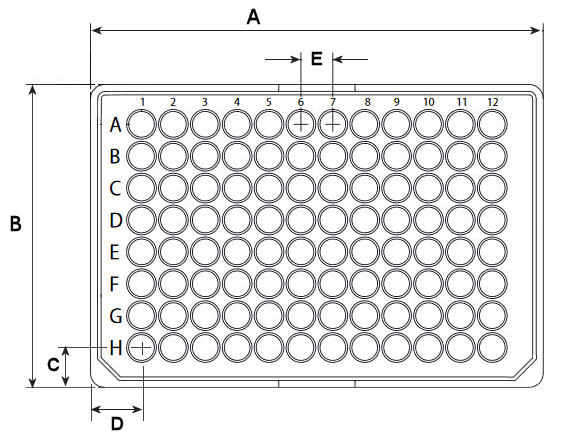
96 Well Microplate Dimensions
| Plate Length | -A- | 127.76 mm |
| Plate Length | -A- | 127.76 mm |
| Plate Width | -B- | 85.48 mm |
| Column Offset | -C- | 11.24 mm |
| Surgical robots | -D- | 14.38 mm |
| Well Spacing | -E- | 9.00 mm |
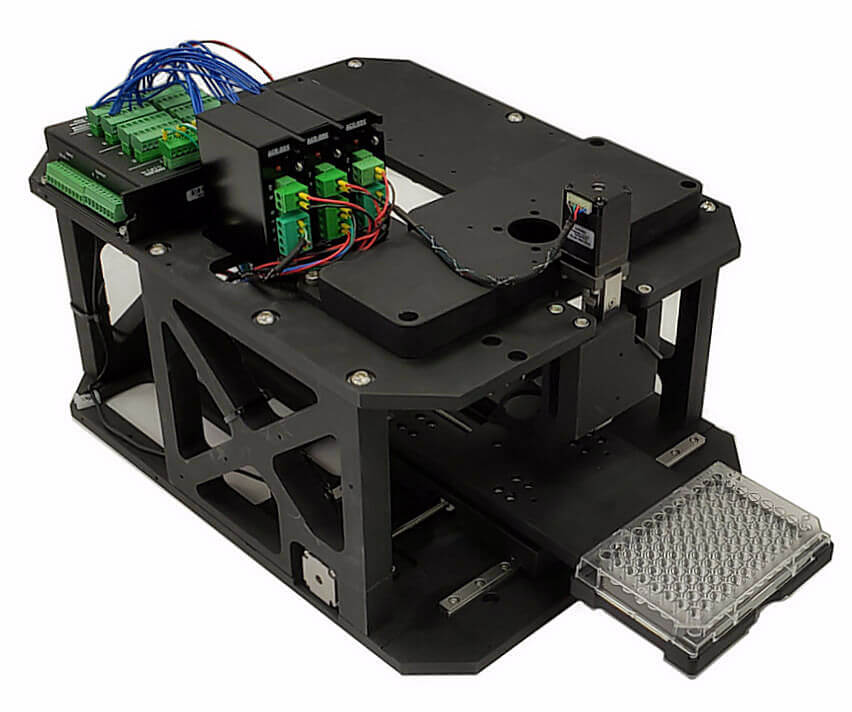
Complete with stepper motors drives and controller.
Payload capacity is 500 grams ( 1.0 lbf)
Long travel x-axis allows for easy loading and unloading of microplate.
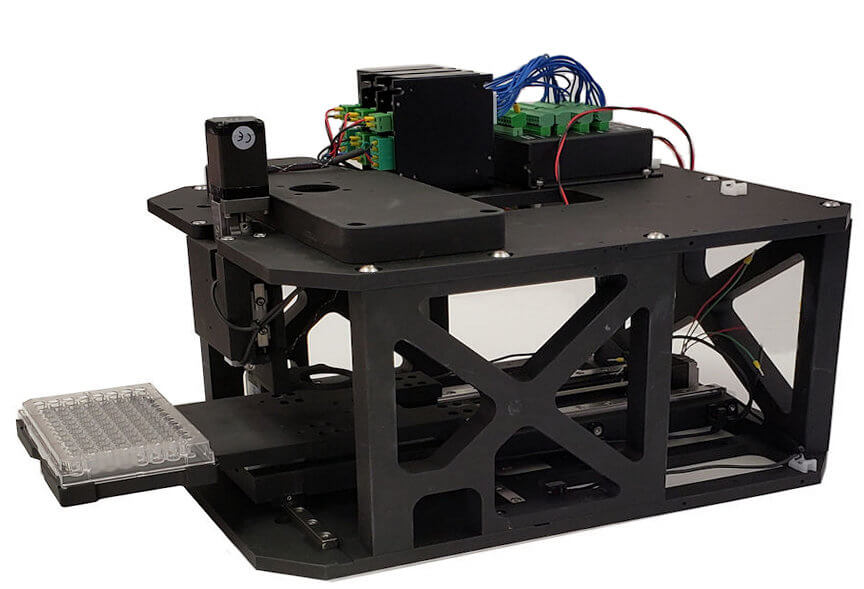
Physical Size
| Side to Side: | 300mm | (11.8in.) |
| Front to Back: | 850mm | (33.5in.) |
| Height: | 450mm | (17.7in.) |
Travel or Stroke
| X-axis: | 200mm | (7.9in.) |
| Y-axis: | 200mm | (7.9in.) |
| Z-axis: | 35mm | (1.4in.) |
“Project started as a bare bones system but ended with the customer asking us to design and manufacture the entire unit.”
Easy Microplate Loading and Unloading
Our design is able to reach completely outside the housing for easy plate handling. Only a small door or window in the housing is required.
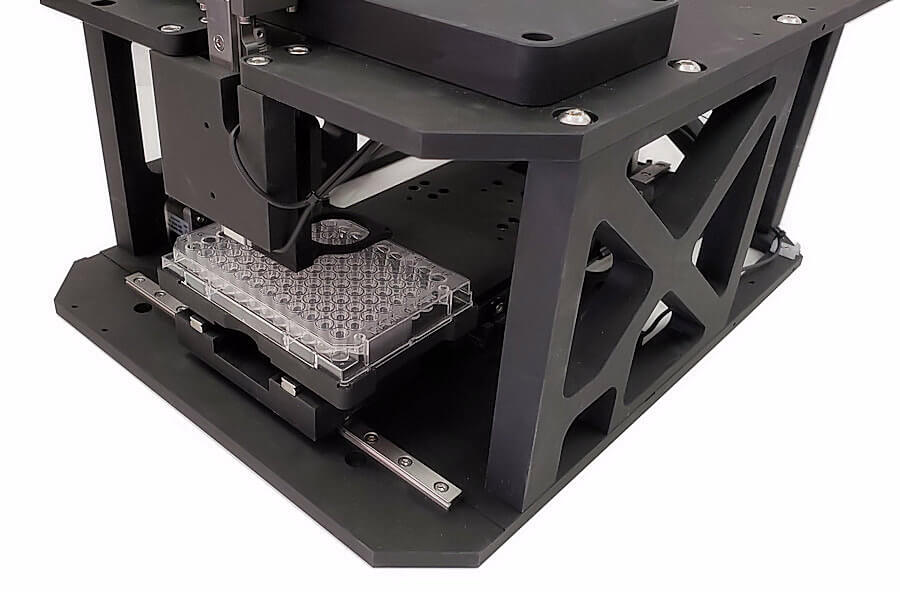
Once Inside, What Happens?
Center of well is positioned under the Z-axis objective lens. The bracket that holds the imaging objective lens moves up or down for focusing. Image is capture, then movement to the next well occurs. Steps are repeated until all wells have been processed.